

The Theory of Golf Simulators
![]()
The ideal golf simulator would need to capture the following 9 parameters in real time:
1. Club speed
2. Club path
3. Club face angle at impact to the ball
4. Club attack angle
5. Ball speed
6. Ball path
7. Ball vertical launch angle
8. Ball spin rate
9. Ball spin axis tilt.
Methods of measuring and calculating ball spin and spin axis tilt
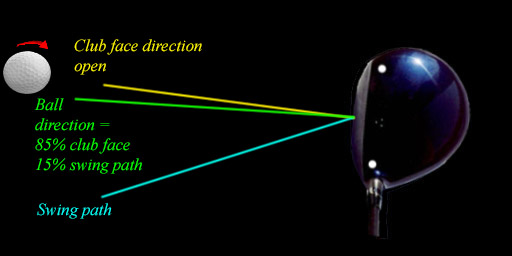
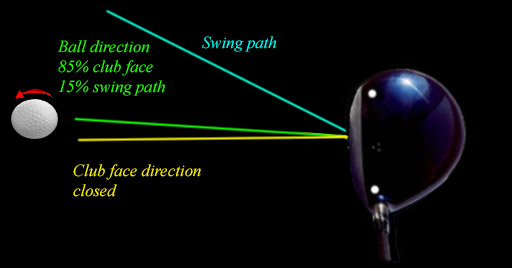
Most simulators don't actually measure ball spin and axis tilt, they calculate them from the relative club face angle to club path.
There being a direct relationship between club head data and ball spin. ie a relative to path open or closed club face will cause the ball's spin axis to tilt one way or the other and the trajectory will curve to give fades, draws, hooks and slices.
For most players this method works well enough but it is basically only estimated based on this club data. Ideally your system would actually measure the ball spin and spin axis tilt.
Of all the 9 parameters, ball spin and - more importantly - spin axis tilt is the most difficult to measure.
There are two basic ways of accomplishing this:
1. You capture photographic images of the ball in flight and use sophisticated image processing to determine the movement of either markings on the ball or the dimples themselves.
2. You fire a signal - such as light (laser or IR light) or a microwave (radar) - at the ball and measure the amplitude modulation of signals reflected back from the ball to a sensor.
Radar methods include using a ball with a metal chip in it or (apparently) measuring and analyzing the air turbulence around the ball.
The air turbulence method seems a tad ( to say the least ) far fetched to me but this is what I've heard that one manufacturer is claiming.
Because radar based launch monitors used outdoors have the ability to measure the curve in the flight I rather suspect that they back engineer the ball flight trajectory to obtain ball spin and spin axis tilt.
As with calculating ball spin from club data, the reverse is also possible. i.e. club data can be determined from ball spin data and ball spin data can be calculated from ball flight.
In the space confines of a golf simulator however, there is no measurable side curve in the ball flight in the 15 feet or so from the tee to the impact screen so this method wouldn't work.
Photographic method.
The main challenge here is to freeze frame capture clear multiple images of the ball while it is traveling at speeds of up to 200 mph.
In order to accomplish this the camera's shutter speed has to be very fast. ie around 1 micro second or 0.000001 seconds.
At that very fast shutter speed the amount of light reaching the camera's sensors will - under normal lighting conditions - be too low and the captured images will not be usable.
If using markings on the ball (either a line or a pattern) we could get away with using a constant light source but if attempting to capture a lot of detail then a strong close-up strobe or flash light would be required.
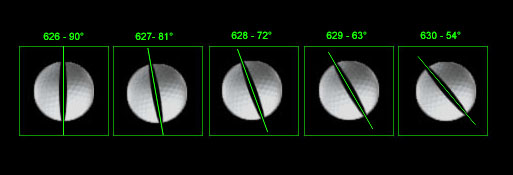
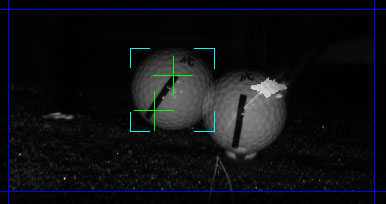
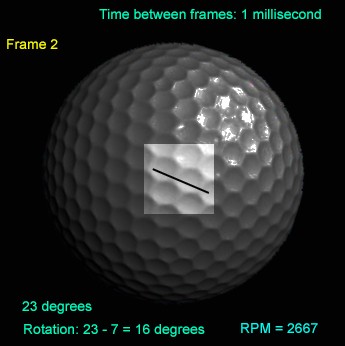
The above image shows a series of images of a ball captured by a camera during flight. The ball has one line and image processing could easily detect the motion of the line and thus the spin rate.
LX Infinity / LXPro all around ball spin patterns
An issue with using balls that only have markings or a ball logo on one side of the ball to detect spin and spin axis is that the player is required to place the ball on the hitting mat with these markings facing the camera.
This isn't too much of a problem when teeing up - as the player has to bend down anyway to place the ball on the tee - but to have to bend down for every shot can be tiresome and a possibly a strain on the players back.
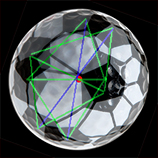
The solution is to use balls that have markings in some sort of even pattern all around the ball. One such commercially available ball is the soccer golf ball. The above images shows that the same method can be used for 5 sided polygons (which are essentially 5 triangles with a common apex evenly spread) as with the 2 or 3 dot method.
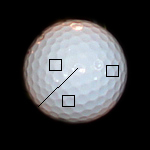
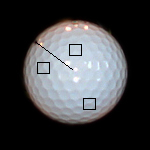
Virtual Dots
This method involves selecting small areas of the ball in the first image and - through a process of rotation and image matching - attempting to find these areas again in a second image of the ball after it has rotated a number of degrees.
The above images were taken with the LX Pro 2 using Xenon flashes.
I've drawn a line to show the actual rotation as a guide but you can see it is going to be quite a challenge to pull this off. First issue is that some dimples are reflecting the flash back and appear very bright.
These have to be identified and removed from the images as they will cause problems with the matching process.
The main problem I see is that there will be so much computation involved with all the image rotations and matching that the process will not be in real time.
i.e. it would take numerous seconds for the process to complete.
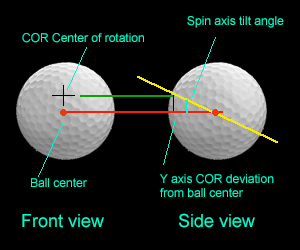
Spin axis tilt
Although spin rate itself is an important aspect in calculating the trajectory of the ball's flight, it will only affect the carry distance by a relatively small amount when compared to initial ball speed.
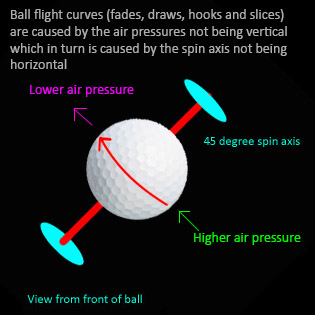
For most players, the axis tilt of the ball's spin will be more noticeable in the flight of the ball as this is what causes the ball to curve i.e. fades, draws, hooks and slices.
As mentioned above, most simulators don't actually measure ball spin and axis tilt, they calculate them from the relative club face angle to club path.
To measure - not calculate - spin axis tilt (otherwise known as side spin) the only proven method (at least known to me) is to capture images of the ball in flight and use
sophisticated image processing to measure the movement of markings or dimples on the ball.
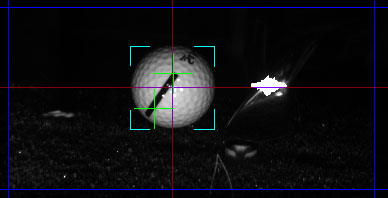
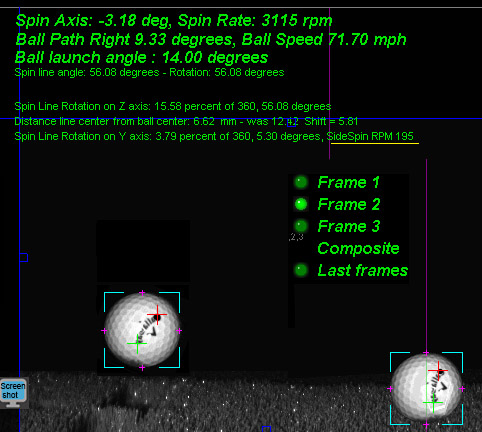
The above image shows our method of measuring ball spin and axis tilt using a single line mark on the ball. .
The following math explains how the spin rate is determined our system
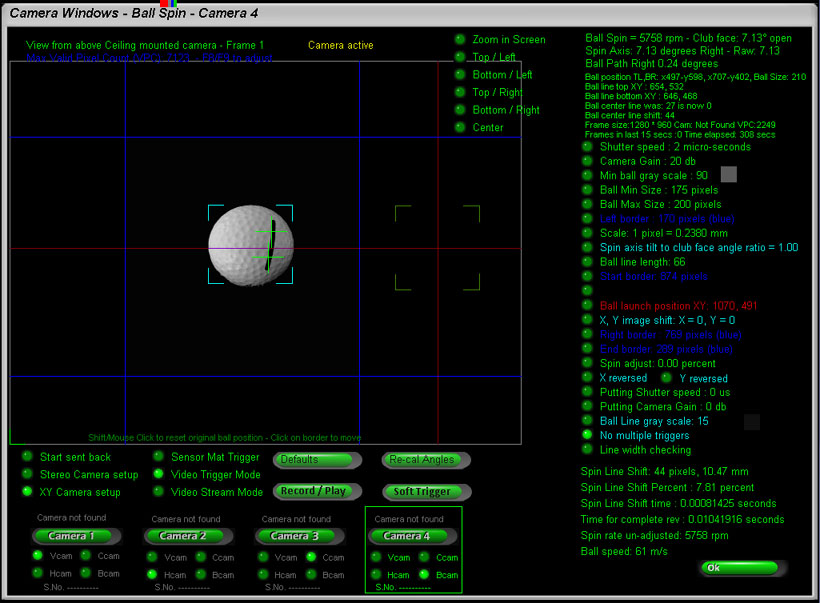
The above image of the ball shortly after impact shows that the spin line has shifted back 10.47 mm from it's original position.
The ball is already in flight and spinning at this stage.
The camera detects a pixel shift of 44 pixels which equates to10.47 mm when the pixel shift is multiplied by the scale factor.
In the above case the scale is 0.238 so 44 * 0.238 = 10.47 mm.
The total circumference of a golf ball is 134 mm so 10.47mm is 7.81 % ( 10.47/134 * 100) of the circumference.
The time it took the line to get from it's original position to the one captured by the camera is determined by the ball speed and the distance the ball traveled from it's original position.
In this case the ball speed is 61 meters per second (measured by the Vcam ball tracking camera)
and the distance the ball traveled (calculated by the launch angle and the distance the trigger sensor is from the ball launch position ) is 50 mm or 0.05 meters.
Time is calculated by the formula t = d/v where d is the distance traveled and v the velocity (speed) of the ball.
So time taken for the shift in this case is 61 / 0.05 = 0.00081425 seconds.
To determine the spin rate of the ball we need to calculate the total time required for a complete revolution.
As we know the time the ball took to shift 7.81% of it's circumference - which equates to a 28 degree turn (360 * 7.81) - , we can calculate the time for a complete revolution
by dividing the time by the percent (to give 1% of the time) and multiplying by 100 to get the complete time.
In this case it would be 0.00081425/7.81 * 100 = 0.01041916 seconds.
This would then equate to 1/ 0.01041916 = 95.9 revolutions per second.
Multiply this by 60 to get revolutions per minute = 5758 rpm
With our overhead mounted camera we can detect up to around 85 degrees of turn which - with a Sand Wedge - will equate to over 10,000 rpm
Drivers will be in the 2000 to 4000 rpm range.
For simplicity we have omitted - in the above description - the fact that the camera sees the ball as a flat image and not as a sphere
and that the actual line shift has to be adjusted to compensate for this.
The actual line shift is the segment length of the ball given the line start and end positions.
However, due to the complexities of adding the varying camera perspectives of the line into the equation we can't just use the above formula to calculate the segment length.
A table look-up method was therefore chosen to convert the flat line shift into a spherical line shift.
Spin Axis and Side Spin
Spin axis is determined by calculating the side spin and using this to obtain a ratio of side spin to back spin which is then used to calculate the spin axis shift from it's norm of zero degrees.
Although some "experts in this field" would say there is no such thing as side spin we could just as equally say there is also no such thing as back spin either:
i.e. there is only spin and spin axis.
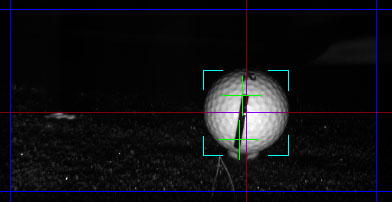
Our cameras see side spin as a shift in line angle from it's norm of zero degrees.
In the above image the line Tilt is 7.72 degrees which - when divided by 360 degrees - equates to 2.144 % of the total 360 degrees.
Knowing the time it took to get to this tilt we can calculate a theoretical side spin speed value. In this case that would be 1112 rpm.
From the previous calculations we know that the ball's back spin is 6584 rpm.
This then gives us a ratio of 1112 : 6584 which can be used to weight the degree shift from the ball's norm of zero degrees back spin axis to the norm of 90 degrees side spin axis.
In this case the spin axis is 7.6 degrees right.
If both the side spin and back spin where equal then the ratio would be 1:1 and the spin axis would be half way between 0 and 90 degrees i.e. 45 degrees.
To clarify: Back spin without side spin has a spin axis of zero degrees. Side spin without back spin has a spin axis of 90 degrees.
So if you hit a ball perfectly square with a lofted club then the spin axis will be zero degrees.
If you hit a ball with a club that has zero degrees loft but the club head is open or closed then you will have only side spin with a spin axis of 90 degrees.
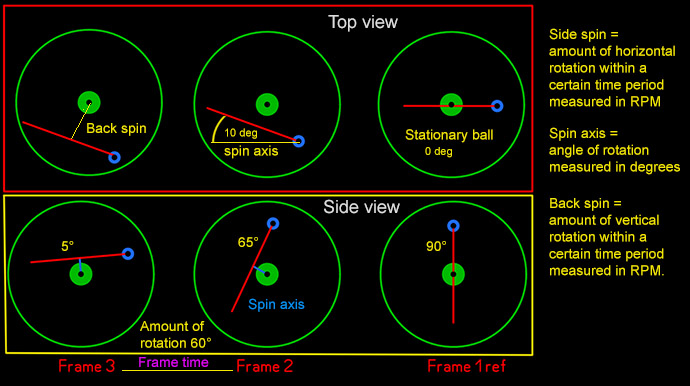
Side Spin and spin axis detection
Note that in reality a ball cannot have both back spin and side spin at the same time. In reality a ball has only spin and spin axis.
Never-the-less, a theoretical side spin rate can be measured by the amount of horizontal rotation within a certain time period.
And a back spin rate can be measured by the amount of vertical rotation within a certain time period.
Side spin theory
Side spin is imparted on the ball by the club face striking the with a relative-to-club-path face angle that is not square - i.e. open or closed.
This open or closed club face relative to the club path will cause the ball's backspin rotation axis to shift off center.
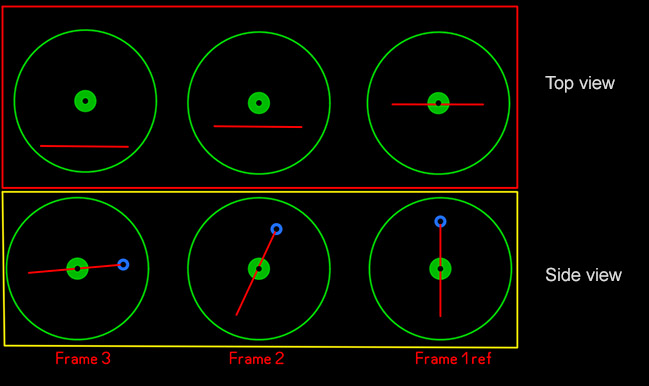
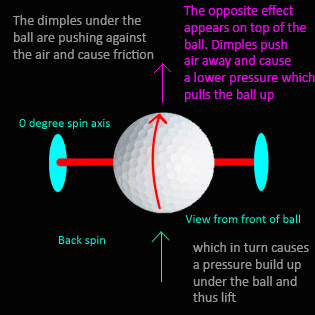
The above image shows ball spin without any side spin and 0 degree spin axis. The red line represents a line or logo on the ball.
If the Bcam is overhead mounted (Top View), then the line will only move backwards in each frame if there is no side spin and the line will have the same angle in each frame.
This backward movement is vertical rotation and is used to measure the back spin.
If the Bcam is mounted at floor level (for a side view) and there is no side spin, the red line will continue to rotate around the initial center of rotation
and the amount of rotation within a certain time period is used to calculate the back spin rate.
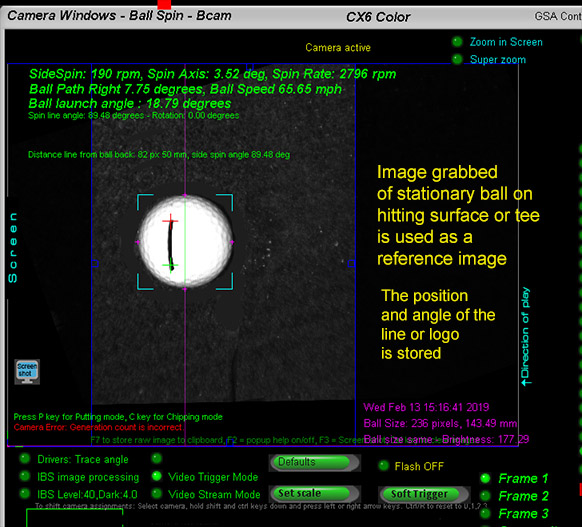
The "ref frame" is a frame of the stationary ball on the ground or tee.
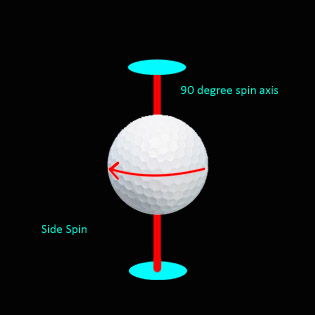
The above image shows ball spin with side spin.
If the Bcam is overhead mounted (Top View), then the line angle will have changed from the initial image of the ball on the ground or tee
to a different angle after launch. This change in angle within a certain time frame is used to calculate the amount of side spin in rpm.
If the Bcam is side mounted (side view), then the line will be seen as rotating around a different axis compared to the initial axis the line was on when on the ground or tee.
We use this shift in spin axis to then calculate the side spin rotation in rpm.
Spin axis theory
Note that spin axis is not always on one plane. i.e. spin axis can have both a vertical and horizontal component to it. Thus the real spin axis is a 3D value.
So when you see a launch monitor displaying a spin axis of 4 degrees left or right, it is not known whether this value is on the vertical or horizontal plane.
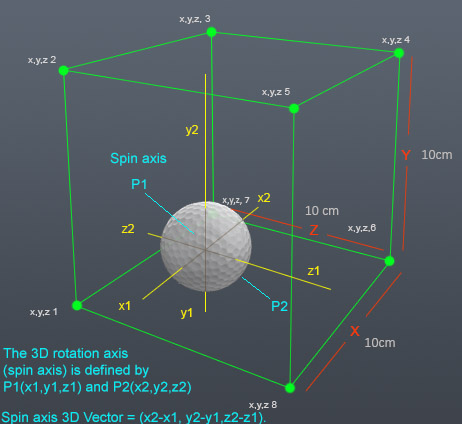
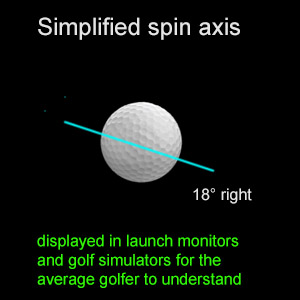
As the real spin axis value can only described by a mathematical 3D vector - which most average golfers will have difficulty comprehending - it is simplified by reducing it to just the one plane.
Just like side spin: it's not real but we can at least grasp its meaning.
Bcam side view images
The above shows real balls - viewed from the side - with a back spin rotation and rotation axis shift.
Side spin can then be converted to spin axis.
Note that both the single camera Bcam and dual camera Bcam Pro are both using reference frames now. i.e. images of the ball on the ground or tee are automatically captured.
Bcam overhead view images

The above images are from the Bcam when mounted overhead.
Dot triangle method of ball spin and spin axis detection
To-date we have been using a line marking on the ball to detect ball spin which works well for spin rates but spin axis detection is not quite as accurate as we'd like.
An alternative method of detecting spin and spin axis is presently being developed using dot markings on the ball instead of a line.

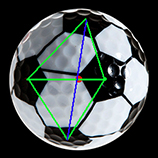
Using 3 dots that form an isosceles triangle - ie a triangle with only two sides equal so that we can see the rotation angle - both spin rate and spin axis can be calculated.
The above image shows a ball spinning on a perfect horizontal axis with the dots at the center of rotation. With this - albeit rather unlikely scenario - the dot rotation is exactly in the center of the ball and thus it can be easily determined that the spin axis is horizontal.

If the dots are always in the center of rotation - again extremely unlikely - then calculating spin axis would be a simple matter. i.e. we just have to measure the center of rotation offset to the center of the ball and apply this to some simple trigonometric math to determine the spin axis.
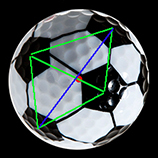
The more likely scenario is that the spin dots are way off the center of rotation but - as shown above - it is still possible to determine the center of rotation by following the rotational path of the dots.
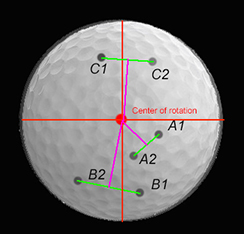
Dot triangle method of ball spin and spin axis detection now with just 2 dots instead of 3.
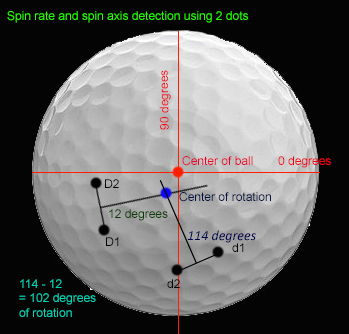
Improvements to the ball spin calculation math now allows the system to use just 2 dots instead of 3. i.e. given the coordinates of 2 dots, the perpendicular can be calculated without the need for the apex of a triangle. Thus the 3rd dot can be eliminated.
The left image shows in more detail the method used to determine both the spin rate and spin axis.
Spin axis is determined by the center of rotation of the dots which is calculated be detecting the intersecting point of the perpendiculars of the dot coordinates.
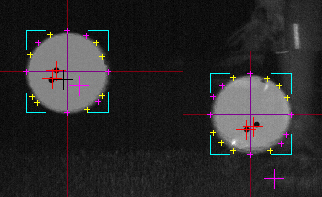
More about spin and spin axis detection
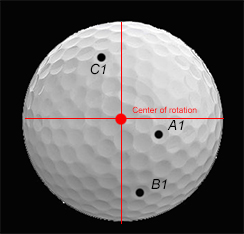
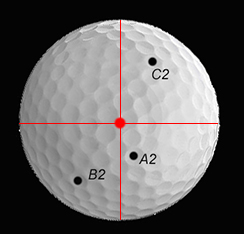
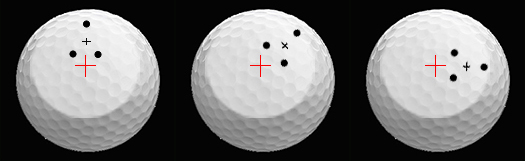
The above images show a ball with 3 dots (A,B and C) placed randomly on the surface of the ball. The left image is in rotation position 1.
The ball is then rotated a number of degrees around it's center to get to rotation position 2 - the middle image.
The right image then shows that the intersecting point of the perpendiculars of the 3 sets of co-ordinates is the center of rotation which equates to the spin axis (in this instance zero).
The number of degrees of rotation - used with the time the ball took to rotate this number of degrees - equates to the spin rate.
Notice that it makes no difference where the dots are placed on the ball. As long as they are not symmetrical, we can detect a pattern that can be found in any rotation as long as they are in the FOV of the camera.
Here the center of rotation is below the center of the ball so the spin axis is negative.
Knowing the center of rotation allows us to calculate the spin axis.
LX Camera perspective distortion correction
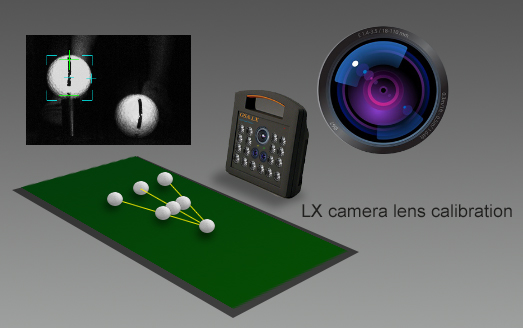
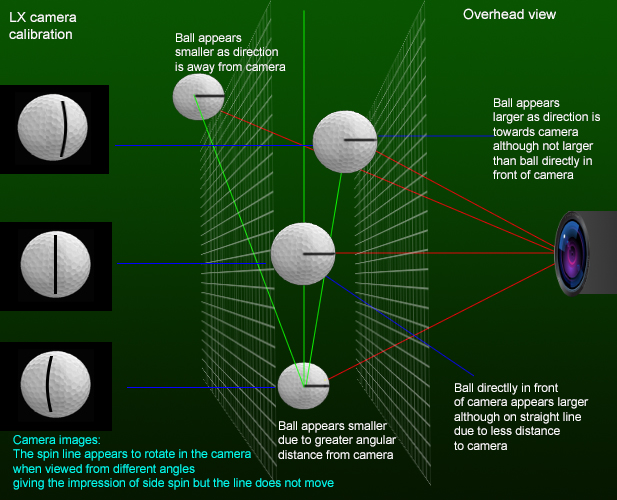
Camera perspective distortion correction is a big issue with any camera based launch monitor and requires complex methods to correct.
The above image details some of the main issues that need to be addressed.
These include ball image size variation depending on the angle of view and not just on the direction of the ball - and the spin line's apparent side shift when viewed from different angles.
These factors have to be taken into account when calculating ball direction by comparing image sizes and side spin or spin axis calculations when determined by measuring spin line side shift.
We are effectively having to produce a 3 dimensional matrix that will contain correction parameters for every square centimeter that the ball could be within the 3D space of the FOV of the camera.
One camera based launch monitor manufacturer on the market today gets around these issues simply by restricting the FOV of camera to a very small window. Problem with that is, the ball's speed and launch angles are then also very restricted so that if the player wants to play a slower or faster shot, or tee the ball up higher or lower, or play a shot with a higher or lower lofted club, the unit has to be moved and/or tilted every time to ensure the ball is in the FOV of the camera. That's not a restriction we or our customers could live with of course.
LX spin detection without ball markings

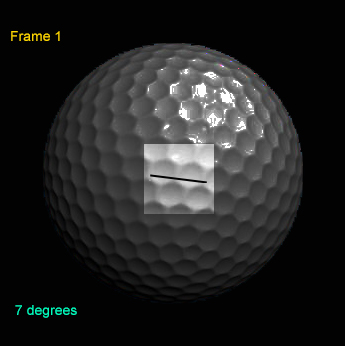
To detect ball spin and spin axis without ball markings will be quite a challenge but the theory is quite simple although the process is very time consuming.
First off, we need very clear images of the ball in flight in order to see the ball's dimples clearly, which will require very fast shutter speeds and a lot of light.
At present, the LX can only acheive this using Xenon flashes but further development of the pulsed LEDs may produce better results at a later date.
The process consists of focusing in on a small segment in the center of the ball and matching this segment between the frames.
Effectively we take the segment from frame 2 and rotate it in 1 degree steps (backwards for back spin) until we get a match with the segment in frame 1.
So for a max rotation of 100 degrees - which gives a max of 10,000 rpm - we would need to rotate and compare the images 100 times assuming the ball's axis is zero.
This probably wouldn't be the case though, so we'd have to repeat the entire 100 rotation and compare processes for every +/- degree of spin axis.
If we set a max of +/- 20 degree spin axis then - in a worse case scenario - we'd have to do some 4000 (100 * 40 ) rotation and comparison computations in order to find a match between frame 2 and frame 1.
4000 image rotation and comparisons may take a while and would probably require quite a fast computer to do in near real time but we'll be working on speeding up the process which, at present, is well over 1 second.
BTW: This spin axis limitation could be a reason you can't produce a slice or hook with the other camera based launch monitors on the market.
Oh, and just in case you are wondering how images are compared, you just subtract all the pixel gray scale levels from one image with the other. If it's an exact match the result should be zero.
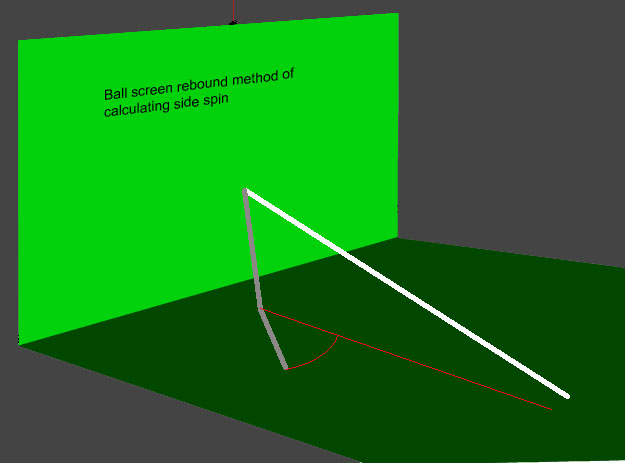
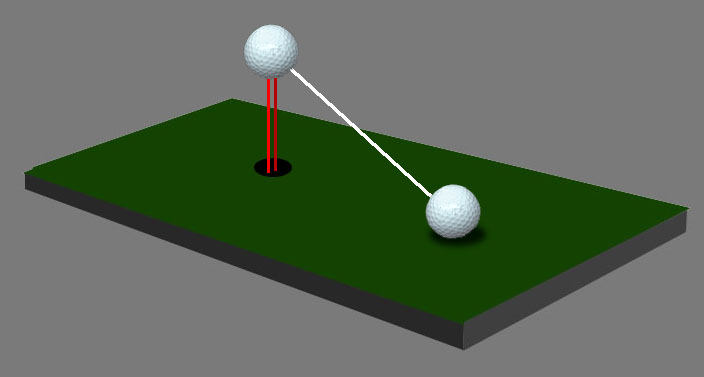
Another - rather novel - method of calculating ball spin axis tilt is to detect the direction of the ball's rebound off the impact screen.
If the ball has any spin axis tilt then it will tend to spin off the screen in the direction of the spin. If the ball has no spin tilt then it will bounce and roll back to the player in a straight line.
The term "Calculating" is probably a little over the top here though. Gestimation would be a more suitable term but the method can give some indication of the ball's side spin.
The main problem being that the screen has to be quite taught in order that the rebound be detectable and this will cause the impact sound level too increase.
Warning: We know of at least two golf simulator companies that use this method - which is just fine - but at least one of them is claiming to measure ball spin and to capture club data - ie path, face angle and speed - from it.
This is total nonsense of course and is an example of extreme marketing hype and very misleading advertising. Buyer beware!
Methods of measuring ball vertical launch angle, ball path and speed
Sonic
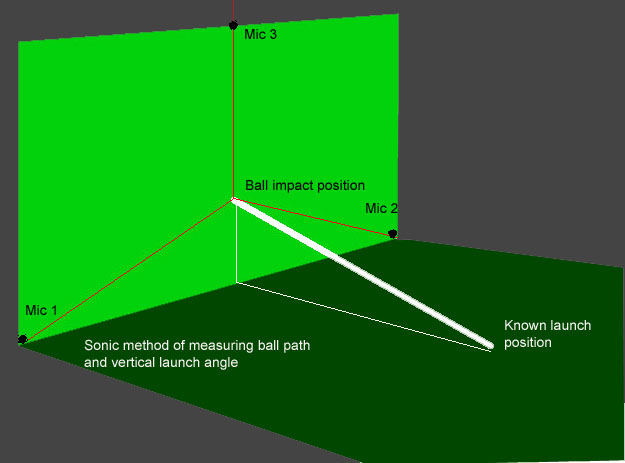
A sonic system (sonic meaning sound) is a system that employs strategically placed microphones around the impact screen.
The system simply measures and compares the intensity of sound that is produced by the ball hitting the screen.
Using 3 or more directional microphones and an interface that can measure the sound amplitude of the impact from each microphone, an XY impact position can be determined.
If you then know the XY co-ordinates of the impact position on the screen and know where the ball launch position was, then it is a simple matter to determine the launch angle.
Ball speed can be calculated by measuring the time between the ball being struck (the microphones will pick this up too) and the ball hitting the screen.
In theory all this should work and is in actual fact used by a number of golf simulator manufacturers but I couldn't say how accurate the method is.
The main disadvantage is that the ball must always hit the screen with a fast shot so that there is no downward curve in the ball's trajectory before hitting the screen.
So chipping and other small shots like putting don't work with a system like this.
You are also forced to play the shot from the exact same position so hitting from other surfaces like simulated rough and sand and greens do not work with this method.
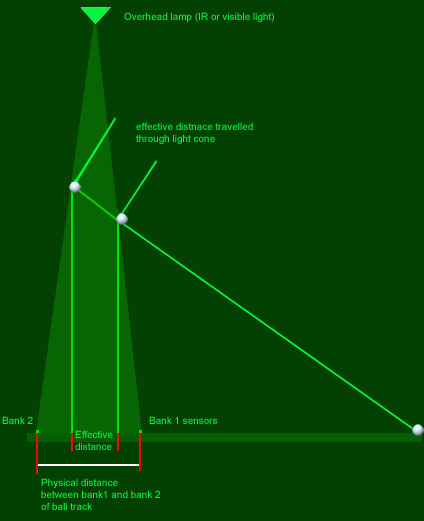
Optical Sensor arrays
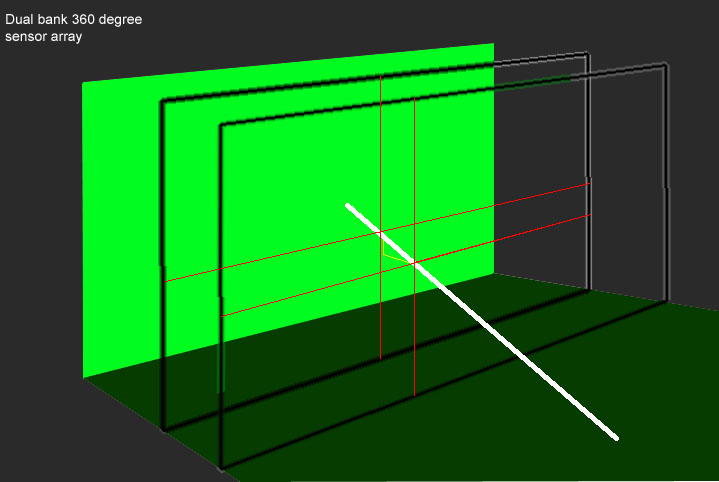
This method uses two banks of IR sensors and emitters to capture two XY co-ordinates of the ball as if travels through them.
The two co-ordinates are then compared to determine the vertical launch angle, ball path and speed.
The system is very accurate but ludicrously expensive to construct as you need hundreds (if not thousands) of optical sensors and emitters.
Because the light from the emitters will reach not only the sensor it is aimed at but also many neighboring sensors - which will cause false readings -
the system has to be multiplexed (scanned). ie Individual sensors are activated only for a short period of time and to see if the ball is in the cross fire of the particular light emitter and sensor.
As with the sonic system, the main disadvantage is that the ball must always hit the screen ( or at least pass through both array banks) with a fast shot so that there is no downward curve in the ball's trajectory before hitting the screen.
So chipping and other small shots don't work very well with a system like this.
However, you can play the shot from other surfaces like simulated rough and sand and greens.
Camera ball tracking
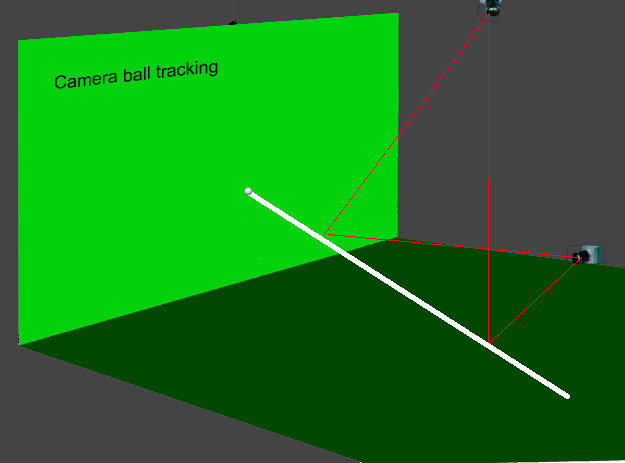
Cameras are becoming the first choice of engineers designing ball tracking systems these days. They offer many advantages, are flexible, relatively inexpensive and reliable.
There are a number of configuration and setup choices with cameras including, XY or Stereophonic positioning, free running cameras or triggered methods, on-board or external image processing.
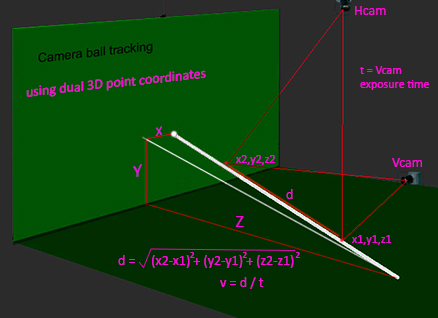
To capture the basic 3D ball flight parameters (speed, path and vertical launch angle or XYZ) you need at least two cameras.
Free running cameras
If the cameras are to run in free running continuous mode (ie they are continuously capturing and sending frames) then they must be capable of frame rates in excess of 100 frames per second.
Using two cameras then means that the image processing must be able to handle at least 200 frames per second.
This would normally require a dedicated processing unit as the host PC would be too busy rendering complex graphics to handle this.
The processing unit could be a separate PC or the camera itself has on-board processing capabilities.
The big advantage of having on-board camera processing is that the image data does not have to be transmitted along slower lines to the PC.
This line (either USB or FireWire) is usually the bottle neck when attempting to capture high frame rates.
Triggered cameras
An alternative to the free running camera method is to trigger the cameras with a signal as and when the ball has been hit.
The trigger can be an optical sensor or array of sensors that picks up the ball as it passes by and generates a trigger signal to the camera so capturing
the ball in flight at an exact, precise and known moment. This is the method we are currently using.
-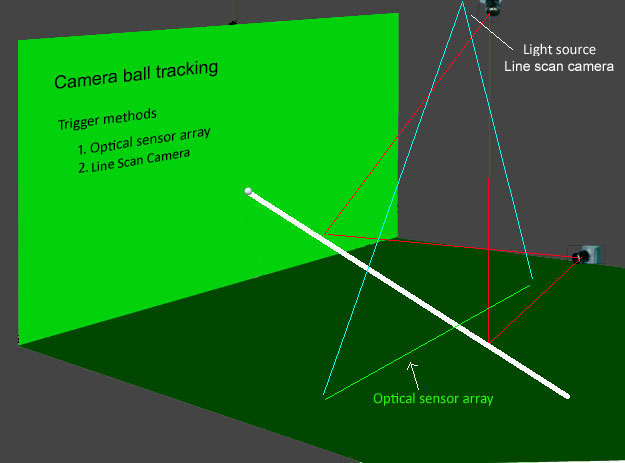
The trigger source can also be a line scan camera that detects the intensity of light reflected back.
As the ball is usually white the intensity of light reflected will be higher when a golf ball is in the camera's FOV.
Camera on-board image processing can be designed to fire a trigger signal to the cameras when the reflected light reaches a certain level.
Line scan cameras don't deliver frames, only lines but are therefore very fast. Usually in the 3000 lines per second range.
Using on-board processing, the line scan camera could detect if a ball is in it's field of view and generate a trigger signal to the other camera or cameras.
The line scan camera's disadvantage is that they are still quite expensive and if the image processing is not done on board then it will again require a separate dedicated additional PC .
Stereoscopic image processing

Up until now our camera ball tracking cameras are mounted in an X,Y configuration.
That is, one camera is floor mounted facing the ball trajectory from the side to see the launch angle (Y) and the other over head mounted facing down to see the ball path (X).
An alternative method of measuring these two angles is to mount both cameras in the upper left and right corners of the enclosure and use what is known as stereoscopic image processing.
You may have noticed that a number of high-end golf simulators use this configuration and method and we will be offering this too soon.
The following is an explanation of stereoscopic image processing relative to a golf simulator.
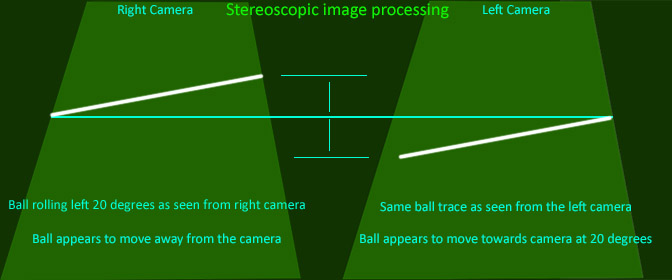
The white lines in these images represent ball traces and angles are measured from a known launch position and center line.
The images and angles appear to be exactly vertically flipped in this case.
It is only when comparing the right camera image to the left camera image do we see what these true angles are.
The first image above is of a ball rolling left on the ground at 20 degrees left. In the right camera this image appears vertically flipped.
If the angles are exactly reversed then we know the ball had no vertical launch angle and just rolled.
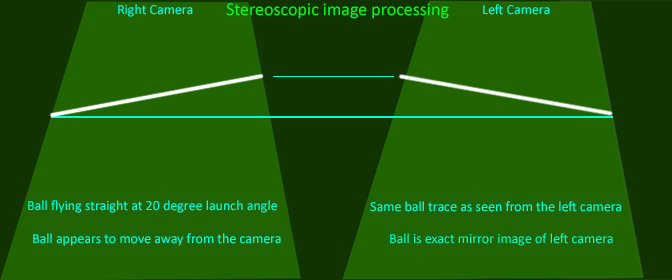
Here, the ball is launched with a 20 degree launch angle with zero degree path. i.e. dead straight. The right camera sees an exact horizontally flipped image of the ball trace.
If the angles are reversed exactly 180 degrees then we know that there was no path component and only vertical launch angle.
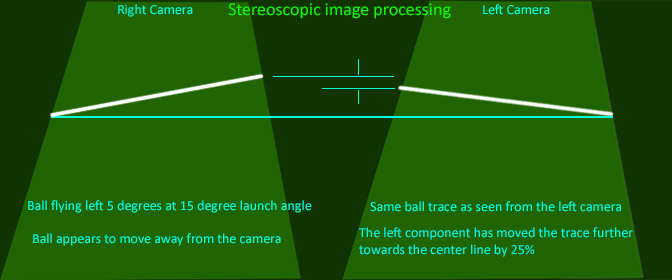
Here we have a mixture of ball path and launch angle. The direction component (left in this case) draws the ball trace further towards the center line in the view.
If we measure the angles we can determine the ratio of ball path and launch angle in the shot. So in this case 25% of the angle is the ball path component and 75% the ball's launch angle.
The angles are scaled to real world path and launch angles depending on the camera's mounting angle.
Surround Pro
Our LX Surround launch monitors use stereoscopic image processing to capture ball spin, spin axis, path, launch angle and speed
Back engineering ball and spin data to club data
The above two - somewhat over exaggerated - images show a shot that produces the exact same ball path with two very different swings.
The only difference being the side spin on the ball. So, for a system to accurately show club data from ball data the side spin measurement and back engineering method would have to be very accurate.
If you're in the market for a golf simulator or launch monitor and are looking to see it's ability to help improve your game then accurate club data would be of great importance and far more important than just ball spin data.
ie what's the good on knowing ball back and side spin of that slice you're trying to fix when you don't know what is causing it.
A lot of systems these days are only capturing ball data and back engineering this to club data which - at least in the systems we have tried - can be way off.
A simple test can verify a systems ability to measure or calculate the club data correctly. Make a very pronounced in-to-out or out-to-in swing and see what the system tells you what the swing path is.
You'll probably find - like we did - it's just a gestimation.

The "High Speed Camera" hype
You'll notice that most golf simulator manufacturers that use camera ball tracking always quote: High Speed Cameras!
with statements like with over 2000 frames per second, you've never seen anything like this before! or the ball is tracked from strike point to the screen at 1000 fps giving unparalleled accuracy!
Unless the manufacturer is measuring ball spin - and to the best of our knowledge there is only golf simulator manufacturer that can do this using marked balls - then this is pure marketing hype and can be completely ignored.
The following images explain:

Camera ball tracking at !0,000 fps --------------------------------------------------------------- Camera ball tracking at 1000 fps
Camera ball tracking at !00 fps -------------------------------------------------------------------- Camera ball tracking at 0 fps (triggered)
The object of camera ball tracking is to measure ball path, ball launch angle and ball speed.
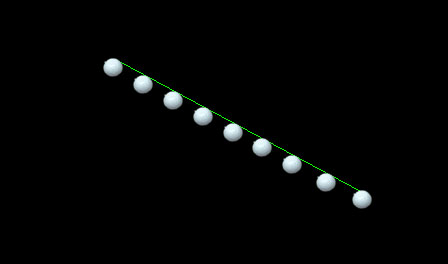
The above images show that this can just as easily be accomplished using any frame rate as you only need two points to measure these parameters.
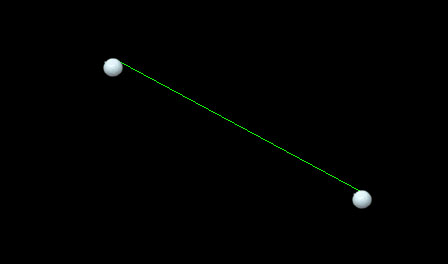
As there will be no detectable ball curve or deviation in it's flight to the screen in a normal shot, capturing more than just two frames is of no value.
For a free running camera 100 fps will be sufficient to capture two images of the ball flight within the 10 ft or so distance to the screen.
In fact, the ball trace left by a triggered camera is just as good - if not better - than that of a camera running at 10,000 fps.
In the very competitive golf simulator market, manufacturers like to try and blind unsuspecting customers with science in order to impress.
It works too. We've had many customers ask us what our camera's frame rates are and use this data to compare with the competition.
It's like "the higher the camera frame rate is the better simulator it is".
Hope the above images and explanation will shed some light on the matter for you.
IR light reflex method of measuring vertical launch angle
This method uses an embedded IR light emitter and sensor in the hitting mat. The sensor is hooked up to a high speed and high resolution Analog Digital Converter
which is capable of capturing at least 800 samples of a ball traveling at 170 mph. This in turn is interfaced to the host PC which processes the triggered light intensity samples.
The amplitude of the reflected light that bounces back to the optical sensor as the ball passes is directly proportional to the height of the ball so
if you know the launch position of the ball then it is an easy matter to determine the launch angle.
This method is used in our VX and ADX products.
(Note: The above image just shows a single emitter and sensor pair but for all practical purposes you'd use an array of sensors and emitters to allow for the ball to deviate left or right.)
Radar
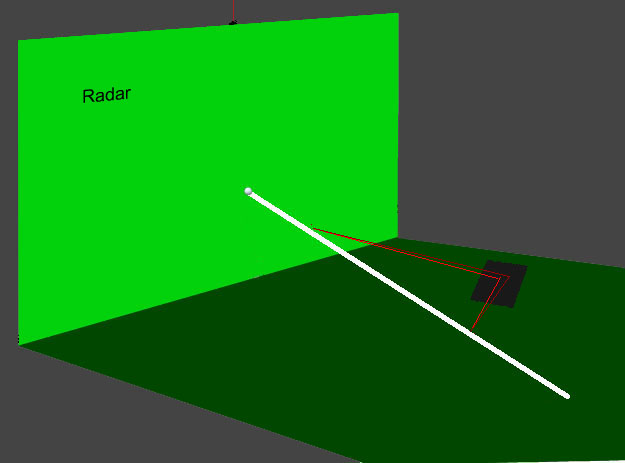
Radar works by emitting micro-waves and processing the reflected signal back. The Doppler effect is used to measure ball speed and positions of the moving ball.
Radar ball tracking is very good when used outdoors because they can track the ball over long distances.
In the confines of a golf simulator enclosure the system has a number of drawbacks though. These include not being able to track the ball while rolling (ie putting) and small chips.
Ball spin and axis tilt is measured using special balls that have a metallic dot insert.
-
Optical sensor or cameras
A case in point is the average sensor pad you can buy these days in the $300 to $3000 price range.
The problem with all optical sensor pad club track systems is threefold:
1. The ball path accuracy is dependent on the number of sensors used in the system, the sensor spacing and the distance the two rows are apart.
Seldom does a sensor club track pad achieve better than 1.5 degree resolution and most not even 2 degrees.
Cameras, on the other hand, feature millions of sensors (pixels) and can thus attain a club path accuracy to within one hundredths of a degree.
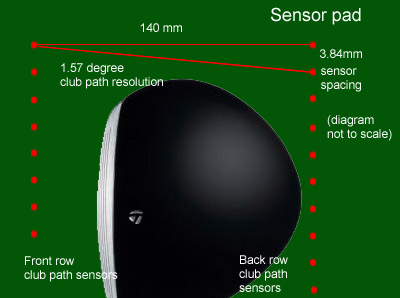

Golf simulator sensor pads detect club path with two rows of sensors.
The usual minimum sensor spacing is 3.84 mm (this being a standard circuit board component hole pitch) which is difficult to improve on due to the physical size of the sensors (usually >3mm).
The club path resolution is then dependent on the row spacing. The further the rows are apart, the better the resolution but if set too far apart the swing arc will distort the measurement.
With a sensor pad that has poor club path resolution (as most do) even 1.5 degree club path won't be detected.
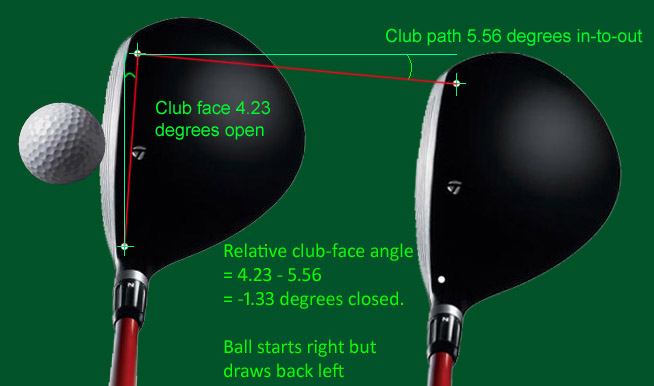
2. Club face angle detection at impact to the ball. The inherent problem is that the club face is often curved and not straight and optical sensors just can't see that.




The above images show what typically occurs. If the player does not strike the ball dead on the sweet spot then the optical sensors will read a false club face angle.
Even though the club face is square, optical sensors can - and often do - read open or closed.
This can cause you to work on an apparent swing fault that is probably not even there.
The image on the right shows that increasing the sensor spacing doesn't help either.
If a sensor pad features multiple club face sensors then this will help but then the true club path would have to be known in order to determine the club face angle.
And as measuring club path with optical sensor pads is prone to large errors this method will also not be accurate.
As ball side spin (spin axis tilt) is a product of club face angle and club path - ie relative face angle - any errors in either of these measurements will lead to false ball trajectory calculations.
Because it's the relative club face angle that determines how the ball will curve, accurate club path measurement is just as important as face angle measurement accuracy.
One without the other can cause the ball flight to fade instead of draw, slice instead of fade, hook instead of draw etc. etc...
3. Incorrect club face angle readings when club passes over sensors high
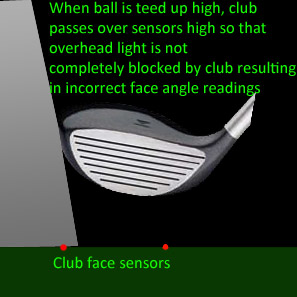
Many players swing with the club head tilted back when teeing off. This, when teeing off with a high tee, will allow light to pass the edge of the club and get down onto the optical sensors which results in incorrect readings.
Especially club face angles can be way off in this scenario. For the optical sensors to respond correctly a dark sharply defined club shadow is required which is usually the case when the club passes low over them.
If - on the other hand - the club head is too high or tilted back the club shadow edges will be unsharp and fuzzy which will result in either the sensors not registering at all or at the wrong time.
Inherent problem with Reflex optical sensor pads.
In addition to the problems inherent in shadow based club tracking pads (ie those requiring an overhead lamp)
reflex optical sensor pads (ie those that feature built-in IR LEDs that measure the reflection off the underside of the club) are subject to further inaccuracies
due to the fact that the underside of a club is also curved and thus the reflection strength is not uniform throughout the width of the club-head.
Optical sensors and their associated latch logic switch at certain and constant light level thresholds so if the reflection strength is not uniform then the switching times of the sensors will vary.
While this may not be important for detecting ball path, it is imperative for measuring club face angle and club speed as the associated timers would be set at incorrect times which will lead to false readings.
In addition, the under side of the club would need to be quite reflective in order for a reflex pad to work at all. With woods and drivers this is often not the case.
The reflective tape nightmare
A part solution to these problems is to stick a straight length of reflective tape to the underside of the club.
It's only a part solution because many modern woods and drivers have highly reflective chrome areas under the club which will reflect the light back to the sensors
before the intended strip so you'd have to actually mask off these chrome areas with even more tape!
And then, after you've carefully and precisely taped up most of the underside of all your clubs it all starts to move and come off when the club makes contact with the grass fibers of the pad. (assuming the pad actually has a grass fiber top of course).
And to top that off you'd have to remove the tape again when playing golf in the real world and stick them all on again to play the simulator.
Optical sensor switching tolerances
Additionally the optical sensors themselves have varying switching levels due to manufacturing and element tolerances so when two or more optical sensors are used to calculate timed parameters
such as club face angle and club speed, the sensors have to be matched or calibrated in order to produce accurate results.
As this is very time consuming process it is unlikely that any manufacturers of sensor pads would make the effort to do this.
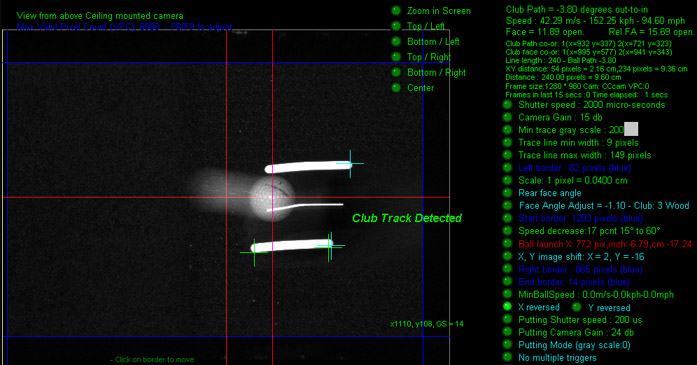
The above image is from our Ccam club tracking camera. Notice how the ball path deviates from the club path.
The club path in this shot was 3.8 degrees out to in while club face angle was 11.89 open. The relative to path face and is thus 15.69 degrees open.
Up until recently, it was commonly thought that the ball path would follow the club path.
The above image however shows that the ball path is more following the face angle. i.e. it's going right and not left as the club path is.
In addition, the ball impact position on the curved club face will also influence the ball's path.
This shot shows that the impact position was more towards the toe of the club so the effective club face angle would be even more open.
Most (if not all) club tracking optical sensor pads on the market today will either use the club path, the club face ange or some combination of the two to determine the ball path.
None of which will be particularly accurate.
The bottom line is that if you want true and very accurate ball and club data detection then the only way is to use cameras.
-
Measuring ball speed with Optical sensors
In order to measure ball speed you need to know the distance the ball traveled within a known time frame.
As opposed to measuring club head speed - which is traveling relatively flat over the sensor pad sensors - a ball is usually traveling at a specific launch angle (unless rolling).
Without knowing the launch angle it is not then possible to measure or calculate the distance the ball has traveled so any ball speed calculations will be inaccurate.
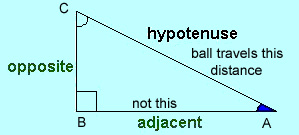
The distance the ball traveled is along the hypotenuse but optical sensors only measure distance along the the adjacent.
When considering a system from a certain manufacturer that claims to measure ball speed with optical sensors but not vertical launch angle then
you should be aware that this claim is flawed and probably nothing more than marketing hype.
Photographic evidence
Other manufacturers of optical sensor club and ball tracking systems make all sorts of wonderful claims about the accuracy of their systems
but at the end of the day you - the potential buyer - just has to take their word for it.
The purchaser of these systems has no way of actually confirming their claims so you are basically left blind.
Camera systems - on the other hand - show actual photographic evidence of the manufacturer's claims.
A camera doesn't lie.
Optical sensor pad reliability.
"Optical sensors are very reliable and will last a life time"
Unfortunately a prerequisite for the above statement to be more than just a hopeful wish is that they are not subject to massive shock vibrations caused by 4000 lb force club head impacts.
Which, in the case of a golf simulator sensor pad, is routine rather than the exception.
While sensor pads have relatively long life spans for home users, all electronic systems that are routinely subject to these types of forces will eventually fail.
The reasons for this is usually one of the following:
1. Over time, hair line cracks will start to appear in the solder joints which then grow in size until there is intermittent or no electrical contact.
2. Elements in the chips and sensors themselves start to break down
3. Static electricity - caused by the club sweeping through synthetic grass fibers - can burn-out and blow sensitive ICs and sensors.
4. Heat and humidity - and thus eventually mold - can build up in the pad causing short circuits.
These faults usually rear their heads outside of the manufacturer's warranty period (usually 6 months) so we advise that you check with the product manufacturer for the price of repairs and/or replacement parts.
If it's just a $300 pad then you can just buy a new one. That's usually not an option with a $3000 pad though.
Once again, if you want true reliability then the only way is to use cameras.
Pros and Cons of fixed camera systems compared to Launch monitors
Thinking of using a launch monitor as golf simulator instead of fixed camera systems ?
Here is a short list of pros and cons of both systems
LX Launch monitor advantages
1. Easy installation
2. Portable
3. Can be used in or out doors
Launch monitor disadvantages
1. Ball must always be played from the same spot. i.e. no ability to use other playing surfaces like fairway, rough, sand and greens.
2. Cannot be used with both left and right handed players in the same flight. i.e. the unit must be moved / turned around for left handed players.
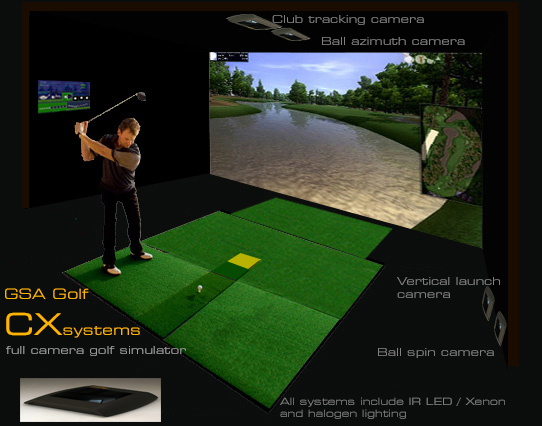
CX camera system advantages
1. Ball can be played from various simulated surfaces like fairway, rough, sand and greens. i.e. You are not confined to play the ball always from the same spot
2. Can be used for both left and righted players in the same flight. i.e. no need to move the unit around
3. Completely modular - start with just 1 camera and add more as and when requirement or budget allows.
4. Very affordable. No other camera based golf simulator on the market comes even close. Starting price is just $1,499
5. Tracks all important club and ball data including ball launch angle, azimuth, spin, spin axis and speed. Club tracking data includes club speed, face angle at impact to ball, club path.
CX camera system disadvantages
1. Installation requires mounting, running cables and setting up the camera's FOV
2. Not Portable
3. Can only be used indoors
CX / LX combinations
GSA Golf CX and LX systems can be combined to provide ideal setups. e.g our CX4 LX system.
All systems are compatible and any combination of CX and LX system will function.
![]()
Pros and Cons of optical systems compared to camera systems
PX optical system advantages
1. Compared to camera systems, optical sensor systems are a breeze to setup
Other than installing the software and mounting an overhead lamp, optical sensor systems are Plug'n,Play
2. Optical sensor systems don't require the room or enclosure to be dark
3. Optical sensor systems don't require flooring to be non reflective
4. Optical sensor systems don't require any tracking dots to be applied the club
PX optical system disadvantages
1. Optical sensor systems are not quite as accurate as camera systems
2. Optical sensor systems can't measure ball launch angle
3. Optical sensor systems require that the player always play the ball from the same spot

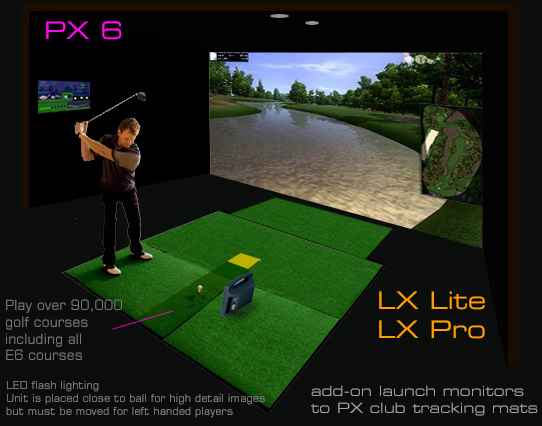
Combining camera and optical sensor systems
Most of the above disadvantages can be overcome by combing both camera and optical sensor systems
The PX5 for example uses optical sensors to capture club data so that there is no requirement to apply any tracking dots to the club
and the cameras capture ball data (ball speed, path and launch angle) and allow the player to hit from other surfaces like fairway, rough, sand and greens for putting.
![]()
 Home
Home Sensors
Sensors Cameras
Cameras Software
Software Enclosures
Enclosures GSA Courses
GSA Courses E6 Courses
E6 Courses Business
Business Tech News
Tech News